Graduate student Runa Ando of Shizuoka University's Graduate School of Science and Technology, and Assistant Professor Yoshihiro Itaguchi (currently an Assistant Professor at Keio University Faculty of Letters) announced that they have found that the weight of a prosthetic arm creates higher than typical arm motion trajectory, which may be the cause of usage difficulties when using it. The pair conducted experiments to determine the effect of weights attached to the forearms of participants on the trajectory of their movement. Since higher movement trajectories require greater muscle output, this may contribute to the discomfort felt by users of prosthetic arms. These findings are expected to lead to the development of more user-friendly prosthetics. The results were published in the March 23 issue of the international scientific journal Experimental Brain Research.
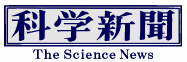
B: An image of a reach-to-grasp movement with a weight.
C: A side-view of a reach-to-grasp movement.
Provided by Runa Ando, Shizuoka University.
There are various types of prosthetic arms, and advances in technology have recently led to the development of prosthetics that can be operated electrically to open and close fingers and perform other movements. However, many users stop using them. Many state that weight of the device was a factor in this decision. However, the impact of the weight of prosthetics on users' movements has not been investigated in detail.
In response, Ando and Itaguchi designed an experiment to clarify the kinetic factors related to weight that make prosthetic arms difficult to use. To simulate changes in arm weight due to the application and removal of a prosthetic arm, they investigated how changes in forearm weight affect motion trajectory during typical movements like reaching out (reaching motion) and grasping an object with the hand extended (reach-to-grasp movements).
20 non-disabled people (mostly students) participated in the experiment. Participants performed both reaching motions and reach-to-grasp movements, in which their right hand was placed on a desk before reaching 30 cm in front of them. These motions were recorded by a motion-capture camera placed above them. To examine the effects of changing arm weight, participants performed 10 movement pattern trials at three different weight conditions (0 grams, 100 grams, and 200 grams). For each movement, 70 trials were performed using two varieties of movement consecutively. Analysis was based on previous studies, using the maximum wrist height of the parabolic trajectory from when the hand left the starting position to reach or grasp the target position as the metric.
The results showed that, for both exercises, the movement trajectories were higher in the light arm condition than in the heavy arm condition on the trials immediately after the arm weight was changed. This difference appeared to be caused by participants' muscle output based on the state of their arms during the immediately preceding trial.
The maximum wrist height was only higher during trials nine and 10 of the 200-gram condition of the reaching grasping motion compared to other conditions. This result indicates that the subjects' arms were trying to ensure successful movement by selecting a higher movement trajectory in the heavy arm condition. This change did not occur in the reaching motion, which required less accuracy than the reach-to-grasp movements. For motions with low accuracy requirements, the effect of arm weight on the motion trajectory was low. These results indicate that immediately after the prosthetic arm is attached or detached, these effects may impair the stability of users' movement.
Prosthetic arms vary in weight, from light (a few hundred grams) models made using a 3D printer to heavy (several kilograms) myoelectric prostheses that read muscle signals. Prosthetic arms are not fitted immediately after amputation but several months later, after the wound is treated and rehabilitated. Therefore, when the patient uses the prosthetic arms, they are used to the lighter, amputated weight and notice the extra heaviness of the prosthetic.
This experiment examined arm movements based on patients undergoing temporary and abrupt changes. It was found that a weight of only 200 grams could alter the motion of grasping an object.
Ando said, "Our experiment investigated the short-term effects of changes in arm weight, but now we are conducting experiments to determine the effects of long-term changes on reaching and grasping movements. We hope that these results will lead to a better understanding of the control mechanisms of object grasping movements in our brains. In the future, we are considering conducting experiments with amputees and patients with brain injuries to examine the relationship with brain functions."
This article has been translated by JST with permission from The Science News Ltd.(https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.