'Multi-legged robots,' which move using many legs similar to centipedes, demonstrate excellent breakdown resistance and prevent instances of falling-over. These robots are expected to play active roles in planetary exploration, disaster relief and other areas inaccessible to humans. However, the legs of such robots interact with the environment in a complex manner and are often difficult to control. Particularly, during walking, numerous feet are required to be placed on the ground to support the weight of the robot against gravity, and this complicates the realization of agile movements such as sharp turns.
Normally, instability must be eliminated during robot control. However, such instability has been suggested to be actively exploited in biological motion control. A research group led by Professor Shinya Aoi of the Graduate School of Engineering Science at Osaka University investigated whether the instability of a multi-legged robot could be employed as a driving force for quickly transitioning to another type of motion.
The research group had already demonstrated that in a multi-legged robot with flexible body axes using rotational springs, a 'pitchfork bifurcation' with the spring stiffness as a parameter destabilizes the straight gait and changes it to a circular gait with a stiffness-dependent radius. Utilizing this instability as a driving force, a new mechanism was developed to induce instability in the straight gait by changing the rotational spring stiffness of the body axis. Furthermore, by controlling the radius of the changing circular gait to reach the destination, the group succeeded in developing an agile and efficient multi-legged robot walking mechanism.
The results of this research, which realized simple control using mechanical characteristics, are expected to be applicable to robots that can actively replace humans in various places and situations. The results are also expected to enhance our understanding of the locomotion strategies of different organisms, including walking, and the development of artifacts.
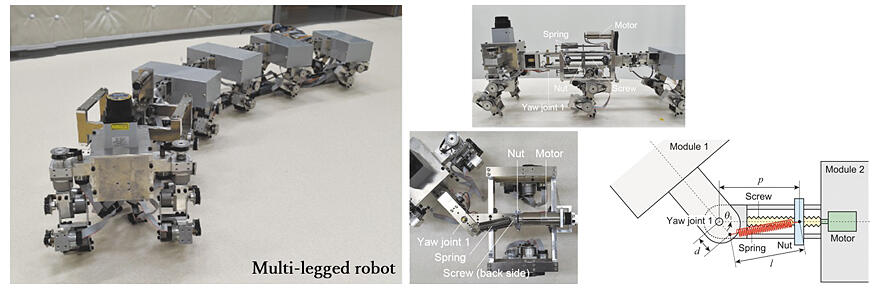
A mechanism for changing the body axis stiffness of multi-legged robots
Journal Information
Publication: Soft Robotics
Title: Maneuverable and Efficient Locomotion of a Myriapod Robot with Variable Body-Axis Flexibility via Instability and Bifurcation
DOI: 10.1089/soro.2022.0177