NEC and Central Nippon Expressway Company Limited (NEXCO Central Japan, Naka Ward, Nagoya) have collaborated to develop a technology for the automated driving of multiple snowplows in an echelon formation, where snowplows are diagonally arranged with appropriate intervehicle distances. The companies plan to conduct test drives and verification experiments, aiming to demonstrate the successful operation of this technology for the autonomous driving of vehicles, while maintaining appropriate intervehicle distances, by the end of FY2024.
Provided by NEC
For the safe use of snowplows on expressways during snowfall, snow removal operations are often undertaken to clear the snow accumulated on multiple lanes via echelon snow plowing; with this type of plowing, several snowplows can travel in tandem under adverse conditions, such as poor visibility caused by snowstorms. During these operations, the lead snowplow and other trailing vehicles are required to maintain certain intervehicle distances and travel in a manner where their front-mounted snow removing blades are slightly overlapping. Therefore, each snowplow vehicle requires two operators on board: one with driving skills and another with training to check the snow-removal-operation equipment and surroundings.
However, owing to the current aging and shrinking working population, snowplow drivers are quite limited. Given these circumstances, the NEC and NEXCO Central Japan attempted to develop an automated driving technology to reduce the required workforce for echelon snow plowing.
The development of this automated driving technology is intended to proceed based on the autonomous driving technology for following truck platooning on expressways (platoon driving technology), developed by the Ministry of Economy, Trade and Industry and the Ministry of Land, Infrastructure, Transport and Tourism; these organizations have developed and tested the automated driving technology for large vehicles on expressways.
The first aspect to consider is the development of a technology that allows each snowplow to travel autonomously along a different trajectory. During platoon driving, a technology wherein the trailing vehicle follows the preceding vehicle along the same trajectory (electronic traction image) is often used.
However, during echelon driving, because the driving trajectory of each vehicle is different, all vehicles must determine their own accurate position using highly accurate satellite positioning systems; moreover, each vehicle must travel autonomously along a different trajectory based on road geometry data.
The second aspect to be considered is the development of a distance-maintaining technology, wherein the trailing vehicle travels along a trajectory different from that of the preceding vehicle while maintaining an appropriate distance.
In conventional platoon driving, the distance to the preceding vehicle is measured using light detection and ranging (LiDAR) equipment, and distance control is performed, along with the implementation of the vehicle-following technology and the measurement of intervehicle distances.
However, during snow removal operations, accurate distance measurements using LiDAR equipment may be difficult owing to reflection from snow. Therefore, establishing the positional relationships between vehicles using intervehicle communication data on the position and speed of each vehicle is essential to enable all vehicles to travel in an echelon formation while maintaining appropriate intervehicle distances.
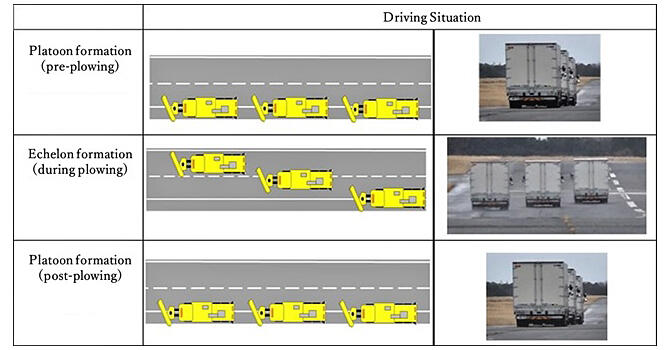
Generally, before commencing snow removal operations, snowplows are deployed from the platoon formation to the echelon formation. At the end of the operation, the snowplows converge from the echelon formation back to the platoon formation.
The two companies have already begun test driving attempts where the steering of the lead vehicle and the steering and speed control of the second and third vehicles are programmed and controlled without human intervention as these vehicles travel from the platoon formation to the echelon formation and back to the platoon formation.
This article has been translated by JST with permission from The Science News Ltd. (https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.