A research group led by Lecturer Ryusuke Noda of the School of Engineering at Tokyo University of Technology (TUT) clarified for the first time the fluid dynamics mechanism involved in the quick escape flight, of a dragonfly. This clarification of the excellent maneuvering flight mechanism unique to dragonflies is expected to lead to the development of next generation flapping aerial robots. The corresponding results have been published in the online edition of the Journal of Fluid Mechanics.
Provided by Tokyo University of Technology
Several insects with flying ability demonstrate excellent flight performance owing to characteristics such as their appropriate sizes and flapping motion, and such insects are attracting attention as design models for new small flying robots. Among these insects, dragonflies have survived and evolved through ancient times and are among the most successful aerial predators on the planet. While several insects execute flapping motion with their forewings and hindwings working as a single pair, dragonflies fly by independently controlling their wings.
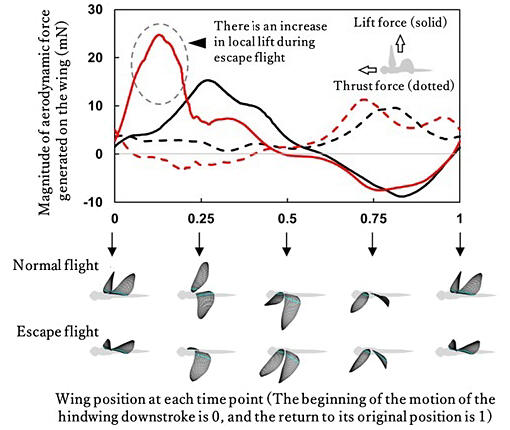
Using the wing motion of dragonflies in normal forward flight and in escape flights, which were assessed for the first time, the research group verified the generation of aerodynamic forces by each flapping motion through a numerical simulation.
The numerical simulation revealed for the first time that during an escape flight, the hindwings create a larger angle of attack than that in a normal forward flight to increase local aerodynamic forces at the expense of flight efficiency. This also suggests that the increase in aerodynamic forces is achieved by skillfully changing the flapping timings (phases) of the forewings and hindwings of dragonflies to leverage the airflow generated by the flapping of the forewings and to promote the stabilization of vortices contributing significantly to the generation of aerodynamic forces on the surfaces of hindwings. This differs from the flapping timings of forewings and hindwings in dragonfly maneuvering flights that have been reported in previous studies and indicates that a new fluid dynamics mechanism may be responsible for the local increase in aerodynamic forces during escape flights.
In recent years, rotary-wing drones have been implemented in various fields, including goods transport, agricultural chemical spraying, and in the inspection of infrastructure facilities. However, to date, certain issues, such as the associated safety and noise levels, remain unaddressed. A flying aerial robot mimicking the flight of organisms, such as dragonflies, that have coexisted in the sphere of human habitation since ancient times, could significantly contribute toward solving these issues, and the results of this study could serve as design guidelines for such robots.
Journal Information
Publication: Journal of Fluid Mechanics
Title: The interplay of kinematics and aerodynamics in multiple flight modes of a dragonfly
DOI: 10.1017/jfm.2023.471
This article has been translated by JST with permission from The Science News Ltd. (https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.