The National Institute of Information and Communications Technology (NICT) has successfully conducted a demonstration experiment in which drones flying beyond the line of sight (out of the reach of direct radio waves owing to the presence of obstacles) could be safely controlled via relay drones. The developed technology, multi-hop relay-control communication system, named as "Command Hopper," will expand the use of drones beyond level-3 flight (i.e., beyond the line of sight with intermediary assistants over uninhabited areas) for applications such as equipment inspection, search-and-rescue operations, and disaster investigation in mountains, at locations out of sight and without cell-phone coverage. NICT expects this technology will bring significant benefits to expand the drone market.
Provided by NICT
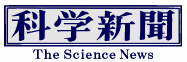
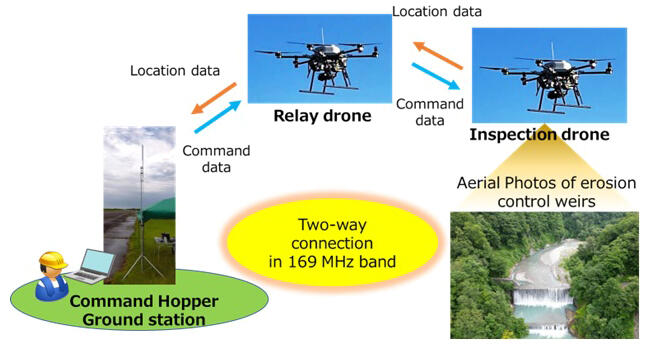
NICT has been developing technology to communicate and connect a ground station and a drone via one to two relay stations on the other drones or the ground using 169 MHz band, which propagate further than the conventional 2.4 GHz band. In this demonstration test, conducted along the Tachiyazawa River at the foot of Mt. Gassan in Yamagata Prefecture, a drone was flown out of sight over a 3.9-km-long one-way route for the purpose of inspecting erosion control weirs placed along the curved river in the mountains. The first use of the Command Hopper to establish communication and connection via an intermediary-hovering relay drone in a curved stream channel, out of sight and out of cell-phone range, allowed for safe and successful control and monitoring of the drone along its entire flight path.
Provided by NICT

Provided by NICT

Provided by NICT
The 169 MHz band used in the experiment meet expectations for the advent of a robotics-enhanced society and the need for long-distance drone operation. It is therefore one of the frequencies used at the wireless station ''Unmanned Mobile Image Transmission System,'' which was institutionalized by the Ministry of Internal Affairs and Communications in August 2016 and can be operated under a license.
This system operates with a transmission output of 10 mW in the air and up to 1 W on the ground. Under favorable conditions, drones and other devices may be controlled remotely over distances ranging from 5 to 10 km. The Command Hopper also ensures uninterrupted wireless communication even in the presence of large obstacles. Consequently, this technology relays control information (command signals) and positional information (telemetry signals) between the drone and the ground station via one or two relay stations, which are relayed in both directions (multi-hop) for communication.
Provided by NICT
In this experiment, NICT made further improvements to the 169 MHz band antenna installed on the drone. In the conventional method, a quarter-wavelength monopole antenna was simply placed on the drone's central fuselage. Then, the fuselage, propeller arms and legs of the drone, which are made of carbon material, affected antenna characteristics. One problem was that good radio wave radiation characteristics could not always be obtained, making the communication distance shorter than expected depending on the drone structure and orientation.

Provided by NICT
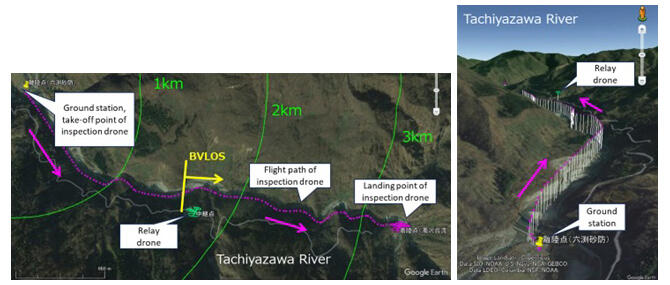
Therefore, to improve this situation, two ground wires (radials) were added to the onboard antennas of the inspection drone and the relay drone. Hence, the communication characteristics of a hop count of 2 via a long-distance with a relay drone were stably obtained. The images of the erosion control weirs could then be safely stored in the camera's memory and acquired in an area that was out of sight from the ground station.

Provided by CTIE
In the future, NICT hopes to further improve the reliability of the system and accumulate operational experience over longer distances and beyond sight, contributing to the spread of flight operations at Level 3 and above.

Provided by NICT
This article has been translated by JST with permission from The Science News Ltd. (https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.