
A bipedal walking robot that moves by utilizing the contraction of cultured skeletal muscle tissue has been developed by Shoji Takeuchi, Professor of Mechanical Engineering in the Department of Intelligent Machines and Informatics, Graduate School of Information Science and Technology, the University of Tokyo. It is considered the first of its kind in the world. The robot performs a "pivot turn," resembling the rotation around the pivot point of the axial foot observed in basketball and can thus change direction with a turning radius equal to half its length. The research group believes that this technology will aid the development of muscle tissue-driven robots and afford new insights into the human gait mechanism.
Robots fabricated by fusing bio-derived materials with mechanical parts are referred to as "bio-hybrid robots." Research into the use of muscle tissue as a driver of robot locomotion has been progressing, and robots capable of caterpillar-like movement and equipped with fish-like fins for swimming have been presented overseas. However, executing turns with small turning radii was challenging because the robots could not stop forward motion while attempting to change direction.
As part of their research on humanoid robots, Takeuchi and his colleagues aimed to fabricate a bio-hybrid bipedal robot capable of fine-tuning its movements. A flexible substrate composed of silicone-based material and cultured skeletal muscle tissue is attached to a 3D-printed plastic structure. Electrical stimulation causes the muscle tissue to contract, producing a flexing of the legs and enabling bipedal locomotion. One leg (the pivot leg) is fixed while the other (the driving leg) is made to turn by applying an electrical stimulation to it.
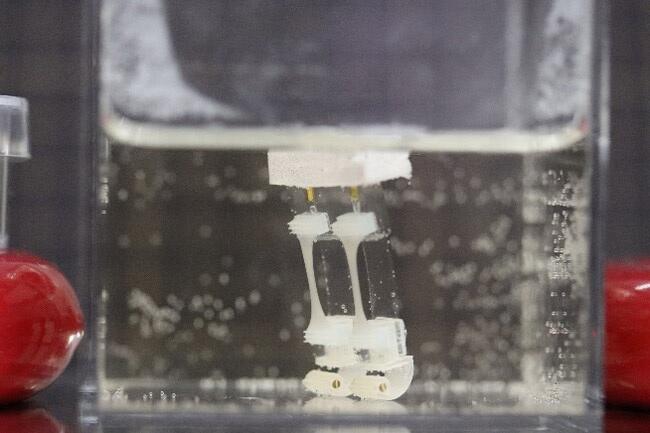
Provided by Professor Shoji Takeuchi, University of Tokyo
In terms of the small turns executed while changing direction, conventional robots, which were unable to stop while moving forward, exhibited a "turning ratio" (the ratio of the robot length to the turning radius) of 0.4 and changed its direction in a circular motion with a turning radius exceeding the robot's length. In contrast, the presented bipedal robot exhibited a turning ratio of 2.1 and was able to change direction in a circular motion with an approximate radius of 5 mm, using the two aligned legs of about 1cm width.
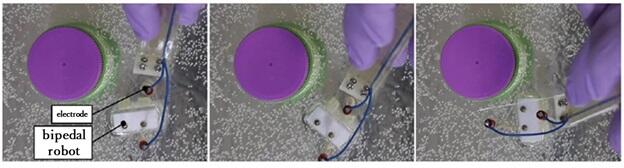
Photos provided by Professor Shoji Takeuchi, the University of Tokyo
Regarding future prospects, Takeuchi commented, "Muscle output is proportional to the cross-sectional area, and we therefore need thicker muscles to generate more force. However, the technology for the distribution of nutrients within muscles has not yet been established. We intend to enhance the bipedal robot by harnessing our laboratory knowledge from the ongoing experience in which we are making thick meat from cultured meat."
This research was conducted in collaboration with Waseda University and published on January 26, 2024, in the electronic edition of the U.S. scientific journal Matter; it has been selected as the cover story of the March issue.
Original article was provided by the Science Portal and has been translated by Science Japan.