On February 19, a research group led by Associate Professor Daigo Terutsuki of the Department of Mechanical Engineering and Robotics, Faculty of Textile Science and Technology at Shinshu University, and Associate Professor Toshiyuki Nakata at the Graduate School of Engineering and Graduate Student Chihiro Fukui at the Graduate School of Science and Engineering at Chiba University has announced that they developed a biohybrid drone using an odor sensor based on antennae of a live silkworm moth and achieved a world record for odor source localization by a small drone. They dramatically improved the odor-tracking accuracy and range, inspired by the pheromone-searching behavior of insects. They achieved a small drone's world record for an odor source searching range of up to 5 m. The findings are expected to contribute to the development of technology for searching for people in need of rescue at disaster sites and similar sites and were published in the international journal npj Robotics on February 5.
Provided by Associate Professor Daigo Terutsuki, Shinshu University
Insects have an excellent sense of smell. For example, male silkworm moths find females several kilometers away through "odor source localization behavior," which relies on airborne female pheromones. The insects' superior odor source localization ability is expected to find application to more effective search and detection in various areas, such as localization of people in need of rescue at disaster sites and detection of hazardous substances.
In 2021, Terutsuki and his team developed a biohybrid drone equipped with an odor sensor based on the antennae of a live silkworm moth, which successfully identified the concentration and direction of the odor and used the information to reach the odor source. Meanwhile, the search range of this model was limited to 2 m.
In this study, the research group aimed to enhance the odor-tracking ability to allow for the localization of people in need of rescue at disaster sites. Generally, drones fly with multiple propellers, which create a symmetrical flow, hampering the determination of the direction from which the odor is coming. Therefore, they focused on the wing-fanning effect of insects.
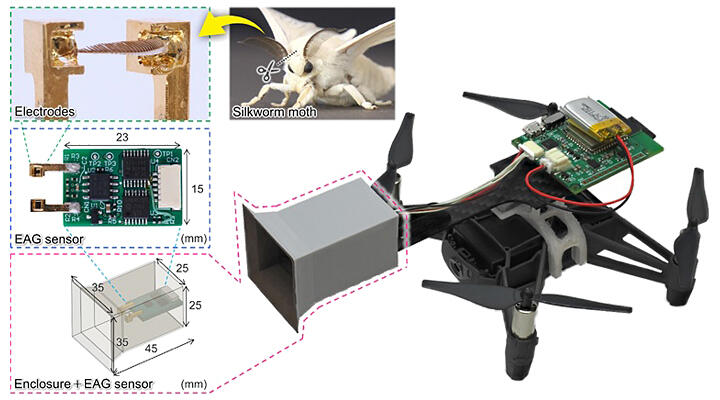
Nakata and his colleagues have previously shown that silkworm moths control odor-containing air currents through wing fanning, guiding the odor from the forward direction toward their antennae. To incorporate this capability into the drone, an enclosure (cover) was installed to efficiently collect odor components to an odor sensor placed anterior to the propellers. Such a drone could more strongly detect the odor within a range of 45° to the left and right toward the direction of the odor source. They also focused on insects pausing intermittently during odor searches rather than continuously moving. They developed the "stepped rotation algorithm" consisting of alternate cycles of rotation incorporating a pause (hovering) and a linear motion over a fixed distance (0.7 m).
With these improvements, the drone could estimate the odor source direction based on the odor information calculated from sensor values acquired during the rotational scanning phase and the angle of the drone and move linearly to the estimated direction. The effect of the enclosure and the implementation of the stepped rotation algorithm more than doubled the tracking accuracy compared to a previous model. Furthermore, the EAG (electroantennography) sensor connected to silkworm moth antennae, which serve as an odor sensor, significantly enhanced circuit configuration and electrode structure in this study.
Implementing a programmable gain amplifier allowed for appropriate amplification of signals from the antennae, improving signal processing efficiency. The electrodes with a grooved design devised in this study prolonged the sensor life to 5 h. In the EAG sensor, a live antenna cut out from a silkworm moth is connected to the electrode. The EAG sensor acquires the electrical signals generated when the antenna detects an odor. The localization experiments were conducted at a range of 5 m using the next-generation hybrid drone developed here and a female silkworm moth pheromone (synthetic bombykol) as the odor source.
As a result, the drone could autonomously correct its flight direction and successfully reach the odor source 5 m away. This distance is a world record for odor source localization by a small drone. Similar results were also obtained when female silkworm moths were used as the odor source.
Terutsuki said, "We are currently conducting research projects sponsored by the Fukushima Institute for Research Education and Innovation (F-REI) in the framework of the Olfactory Flying Robot Consortium consisting of Shinshu University, Chiba University, and Keio University. We are working on biohybrid drones and trying to use antennae of silkworm moths and mosquitoes capable of detecting odors more useful to search for humans. Our objective is to develop new technologies that unlock the future of disaster relief, such as drones for odor-guided searching for people in need of rescue."
Journal Information
Publication: npj Robotics
Title: Advanced bio-hybrid drone for superior odor-source localization: high-precision and extended-range detection capabilities
DOI: 10.1038/s44182-025-00020-9
This article has been translated by JST with permission from The Science News Ltd. (https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.