A research group consisting of Assistant Professor Dai Owaki from the Graduate School of Engineering at Tohoku University, Section Chief Shuhei Ikeda and Director Kazuya Okuizumi from Kamo Aquarium in Tsuruoka City, and Project Research Associate Max Austin and Associate Professor Kohei Nakajima from the Graduate School of Information Science and Technology at the University of Tokyo has successfully developed technology to guide jellyfish swimming by applying electrical stimulation to the muscles of moon jellyfish and predict their movements using simple artificial intelligence (AI). This development is expected to lead to the creation of autonomous cyborg robots for ocean monitoring and environmental conservation. The group's results were published in Nature Communications on May 23.
©Dai Owaki
Biological cyborgs that incorporate the excellent locomotive performance and environmental adaptability of living organisms into artificial systems are attracting attention. Their realization requires the construction of electronic control systems that work in conjunction with biological nerves, muscles, and sensory organs.
Moon jellyfish (Aurelia coerulea), which are widely distributed along Japan's coast and possess efficient underwater locomotion performance, swim by rhythmically moving their umbrella-shaped bodies to generate propulsion. They are equipped with the ability to intentionally change direction and even possess self-repair functions.
Research on "jellyfish cyborgs" that fuse electronic control with actual jellyfish has been conducted, but while speed control was possible, the induction of complex turning movements and prediction of motion had not been achieved. Realizing this required an understanding of the relationship between jellyfish movements arising from complex interactions with fluids, spontaneous neural activity, and external stimuli.
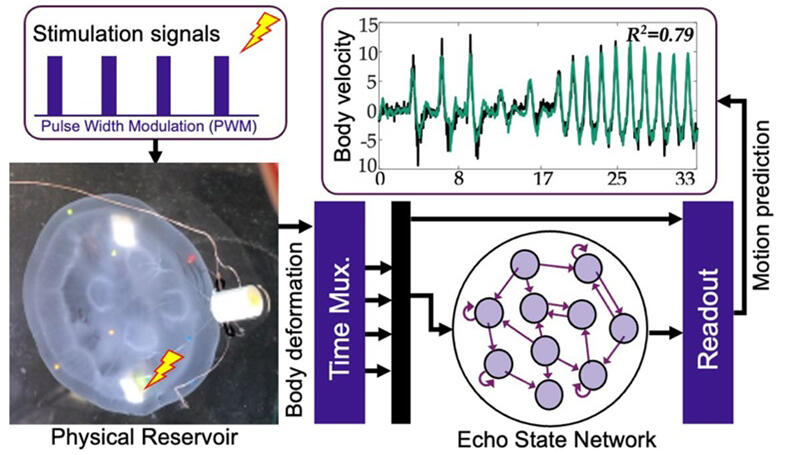
Therefore, the research group aimed to develop new cyborg technology that utilizes the natural "embodied intelligence" that jellyfish inherently possess. Specifically, they built a system that leverages the interaction between the jellyfish's soft body and the underwater environment to predict and control efficient and flexible movement. By inserting electrodes into the jellyfish's coronary muscles and applying electrical stimulation that mimics biological nerve signals using pulse width modulation (PWM) signals, they induced muscle contraction in the jellyfish. This reproduced near-natural floating behavior.
Next, they developed a three-dimensional motion capture system for precisely measuring and predicting jellyfish movement. This method enabled the acquisition of motion data, including jellyfish body deformation, movement speed, and detailed floating trajectories. Markers that reflect UV light are embedded within the jellyfish body, and video images are recorded from three directions using overhead and mirror-based views. The recorded data is analyzed using deep learning algorithms (DeepLabCut) and then reconstructed as three-dimensional movement.
This mechanism enabled the group to guide jellyfish swimming, utilizing spontaneous rhythms by applying electrical stimulation to muscles with optimal timing.
They also found that the spontaneous rhythm of jellyfish swimming is generated by self-organized criticality (SOC). This phenomenon involves systems autonomously transitioning to a critical state without fine external adjustments and is frequently observed in nature.
Furthermore, by applying a computational method called physical Reservoir Computing, the group built an AI model that utilizes the natural movement of jellyfish as part of the "intelligence" to predict their motion.
Leveraging the locomotion performance inherently possessed by living organisms is expected to lead to control technology for cyborg robots that operate with low power and computation.
Owaki commented: "Living creatures, represented by jellyfish, may possess immeasurable abilities that have yet to be revealed. We aim to work on developing sustainable cyborg technology that harnesses such abilities."
This article has been translated by JST with permission from The Science News Ltd. (https://sci-news.co.jp/). Unauthorized reproduction of the article and photographs is prohibited.