
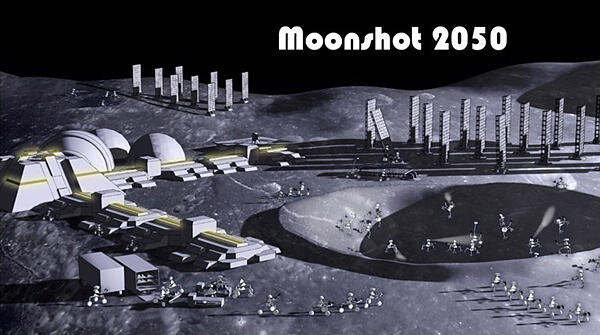
Robots utilizing artificial intelligence (AI) that can transform themselves while working on the lunar surface aim to build a habitable city for humans by 2050-an ambitious goal that seems straight out of science fiction. A research group from Tohoku University and other institutions is working diligently on developing these robots. As part of the government's large-scale "Moonshot Research and Development Program," they recently unveiled their experimental prototype to the press for the first time.
(JAXA in Sagamihara City)
Parts sent to the Moon, reconfigured for different types of work
"Robots will handle all work in dangerous locations. Astronauts will stay in safe places and arrive only after the environment is prepared."
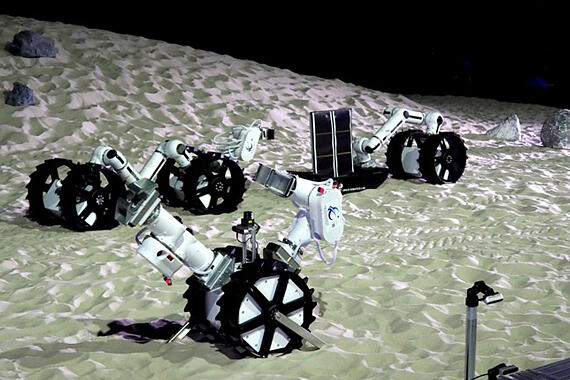
Professor Kazuya Yoshida of Tohoku University's Graduate School of Engineering is the one explaining the concept of lunar city construction by robots. On March 12, at the experimental facility of Japan Aerospace Exploration Agency (JAXA) in Sagamihara City that simulates the lunar surface, he captivated the gathered reporters by introducing powerful concepts like "lunar future city" and "shape-shifting robots" from the very beginning, while demonstrating how his experimental robots, named "Moonbots," perform various tasks. Yoshida, who has long been dedicated to lunar robotics research and is a familiar figure among space journalists, was particularly eloquent that day.
Provided by Yoshida
The most distinctive feature of these robots is that they're assembled on the lunar surface. Since transporting items from Earth to the Moon by rocket is costly, anything sent must be utilized effectively. Rather than completed robots, "modules"-components with specific functions like wheels or arms-will be sent to be assembled on the moon according to their purpose. After completing specific tasks, the robots autonomously reconfigure using AI to transform for the next assignment or undergo repairs using lunar resources.
"Using modules improves storage efficiency during rocket transport and allows for versatile on-site reconfiguration. Assembling and transforming for self-regeneration on the lunar surface represents a new challenge," Yoshida emphasized. A robot is needed on the moon to assemble these robots, and the experiment demonstrated how modules can be combined.
Handling construction... from power facilities to living quarters
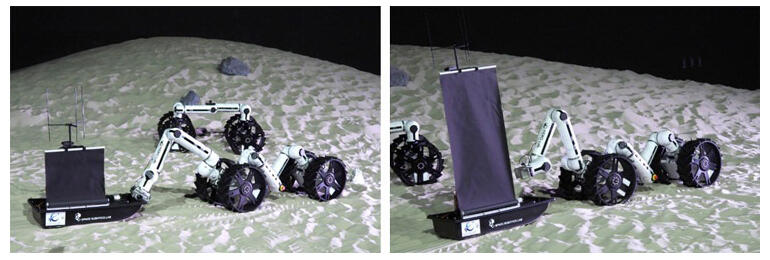
Once assembled, the robots transport materials, conduct civil engineering work, deploy structures, and perform assembly. One impressive demonstration in the experiment was the installation of solar panels. A Moonbot pulled a panel-loaded base to the destination, where the rolled-up panel then deployed. Future plans include eliminating the need for dedicated motors that deploy the panels by transmitting power from the robot's own motors for the deployment.
The construction method for lunar habitation modules where humans will work and live is equally innovative. Air is pumped through the walls of folded membrane structures into their inside like balloons to inflate them. Meanwhile, robots stand by, monitoring the inflation with cameras, detecting areas with insufficient expansion, and guiding the structure to completion.
Regarding inflatable habitat precedents, Professor Shinichi Kimura of Tokyo University of Science's Faculty of Science and Technology, who is participating in Yoshida's group, mentioned the "BEAM" deployed by a U.S. company to the International Space Station (ISS) in 2016. "BEAM significantly raised awareness of inflatable structures, but its membrane ended up becoming quite thick to ensure it wouldn't rupture. They called it 'expandable' rather than 'inflatable'," he explained.
In contrast, Kimura proposes a "multi-cell" structure with numerous divided balloon sections, where other cells can compensate if holes develop in a few cells. "This distributed approach to durability allows for softer membranes," Kimura noted.

The team is also researching how robots can maintain stable postures, move efficiently, and navigate non-level ground by learning autonomously through AI rather than requiring detailed human instructions.
"Showcasing Japanese technology" in lunar polar development
Manned space activities are expected to expand from low Earth orbit, where the ISS circles at an altitude of 400 kilometers, to the Moon, 380,000 kilometers from Earth. The United States is leading a major international exploration initiative called the "Artemis program," with human lunar landings currently scheduled for mid-2027-the first since the Apollo program ended in 1972. The Japanese and U.S. governments have already agreed that two Japanese astronauts will land on the moon as part of this program.
Yoshida's robots aim to contribute to the Artemis program, targeting the lunar polar regions as their initial workspace. The shadowed portions of craters in these regions, which never receive sunlight, are thought to harbor ice. This is expected to be usable as drinking water for astronauts or electrolyzed using solar power into hydrogen and oxygen for fuel-a widely recognized benefit of lunar development.
"We're entering the international competition for polar region development to demonstrate Japan's technological capabilities and establish our presence at the forefront of robotics. We're proceeding with the strong conviction that the polar regions are the prime target," said Yoshida. While carefully verifying through scientific research whether sufficient water exists on the moon as a resource, it's necessary to refine world-leading technology.
"While the lunar polar regions are our most obvious initial target, we're certainly not limiting ourselves. Technology that works in the harsh temperature environment of the lunar polar region can be readily applied to other areas of the moon or Mars," Yoshida explained. These technologies could also be adapted for disaster response on Earth.
Robots Working in Lunar Subsurface Cavities
The Moonshot Research and Development Program was established in 2018 as "a new system promoted collectively by relevant ministries and agencies under the command tower of the Council for Science, Technology and Innovation, to pursue challenging research and development based on bold ideas that go beyond conventional extension, aiming to create disruptive innovations originating from Japan." Of its ten goals, the Japan Science and Technology Agency (JST) oversees seven. "Self-Evolving AI Robot System for Lunar Exploration and Human Outpost Construction," led by Yoshida as project manager, was selected in FY2022 under Goal 3: "Realization of AI robots that autonomously learn, adapt their behavior, and coexist with humans through AI-robot co-evolution by 2050." Besides Tohoku University, participants include Osaka Institute of Technology, Kyoto University, Tokyo University of Science, and the National Institute of Advanced Industrial Science and Technology.
While the experiments are conducted at JAXA facilities, JAXA is not the main entity behind this activity. Although "Moonshot" contains the word "moon" and the press demonstration particular showcase happened to focus on lunar themes, the program encompasses diverse fields including health, meteorology, and resources.
At the Expo 2025, Osaka, Kansai opening on March 13, an interactive exhibition called "Moonshot Park-Look! Touch! Feel! New Future!" will run from July 22 to September 15, featuring future societies envisioned by the Moonshot program. From August 6-11, an evolved version of the prototype will be displayed under the theme "What would you like to do in a lunar world built by robots?"
Moonshot Goal 3 includes a project other than the one run by Yoshida's group - i.e., a lunar surface-related project led by Professor Yasuharu Kunii of Chuo University's Faculty of Science and Engineering. Kunii's group is developing robots for exploration and habitat construction within subsurface "lava tubes"-cavities formed after lava flows.

Human-robot relationship: "Autonomy" as the key concept
What would be an ideal relationship between humans and robots on the moon? Yoshida shared his thoughts.
"Currently, astronauts go to the ISS wanting to engage in productive scientific and intellectual activities, but in reality, they spend considerable time on logistics (tasks involving moving and storing items) and similar work. Such tasks should be delegated to robots as much as possible."
"We're not suggesting 100% delegation to robots. Humans should provide macro-level commands like 'what to do next,' but robots should autonomously interpret these commands and determine how to move. Also, whether humans are on the lunar surface or Earth, they should serve as site supervisors while robots do all the physical work. Humans shouldn't have to wear spacesuits for dangerous external activities but should perform intellectual tasks requiring brainpower from safe locations."
"There are concepts like 'shared autonomy,' where humans and machines divide degrees of autonomy, or 'supervised autonomy,' where machines basically operate autonomously but humans intervene when something goes wrong. This isn't limited to our lunar robot challenge but applies to interactions between AI-enabled machines and humans in general. I believe the most desirable human-machine relationship is one where humans manage the overall process while machines autonomously handle various tasks within that framework."

While lunar robot development and city construction are exciting topics, the deeper question posed in the Expo exhibition subtitle-"What would you like to do on the moon?"-invites broader discussion. As these concepts become more realistic, interest and debate will likely expand. Perhaps we should also ask, "What do humans want to become?" People must avoid becoming lazy despite reaping the benefits of convenient technologies like robots and AI. Whether on the moon or elsewhere, we should aspire to remain beings who skillfully use technology to enhance our intellectual curiosity and "make our brains sweat."
(KUSAKA Takeo / Science Portal Editorial Department)
Original article was provided by the Science Portal and has been translated by Science Japan.